
Abstract
Now a day’s science and technology is being used in every stage of human lives. Working in certain fields like high voltage transmission lines, mining at deeper level in earth crest, working with explosive material (bomb) etc. and all such dangerous fields where only robots cannot work by their own intelligence effectively. At the same time only human worker also cannot work safely.
To overcome such issues it is necessary to have the system which will fulfil both the requirements i.e. human body will guide the task and machine (robotic Shadow) will act accordingly, consequently the risk factor of working in the above mentioned field will automatically decrease without affecting employment of worker. In the present investigation we have designed a prototype of human head which copies our head movements and eye section of it is programmed on Arduino UNO.
Steps for making
- To build input exoskeleton I used PVC pipes and potentiometer, and arrange them or join them in such a structure so that they can easily fit over my head nicely.
.jpg)
- Then at each join on exoskeleton I attached potentiometer in a way that whenever we move our head it creates change in resistance.
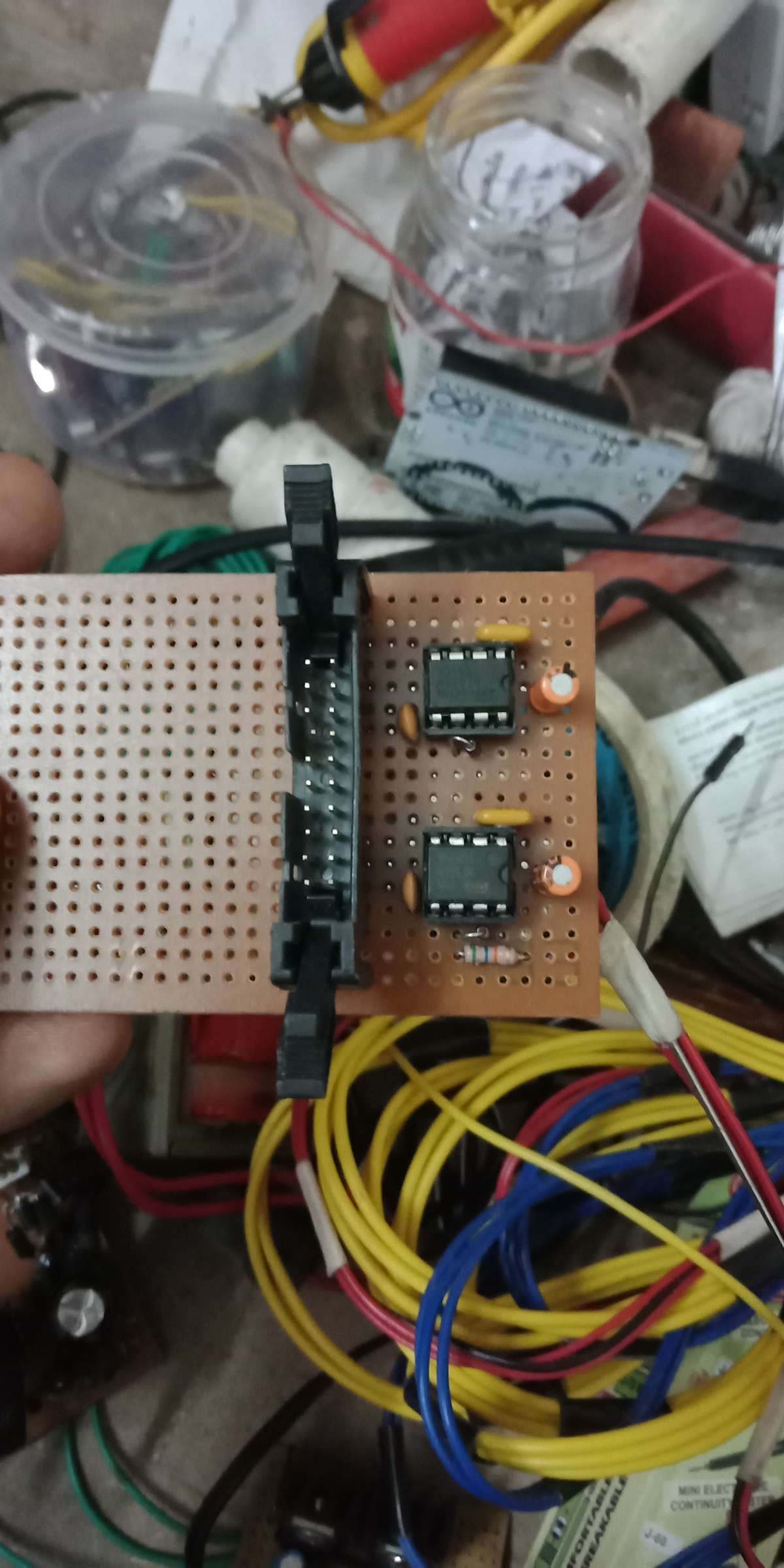
- And all those potentiometer is connected to a servo motor driver at first stage, afterward I connected microcontroller(Arduino NANO) and NRF24l01 transceiver module for wireless communication.
- In first prototype I have created wired model so I build servo driver circuit using NE555 IC. after that I have change it into a wireless circuit.
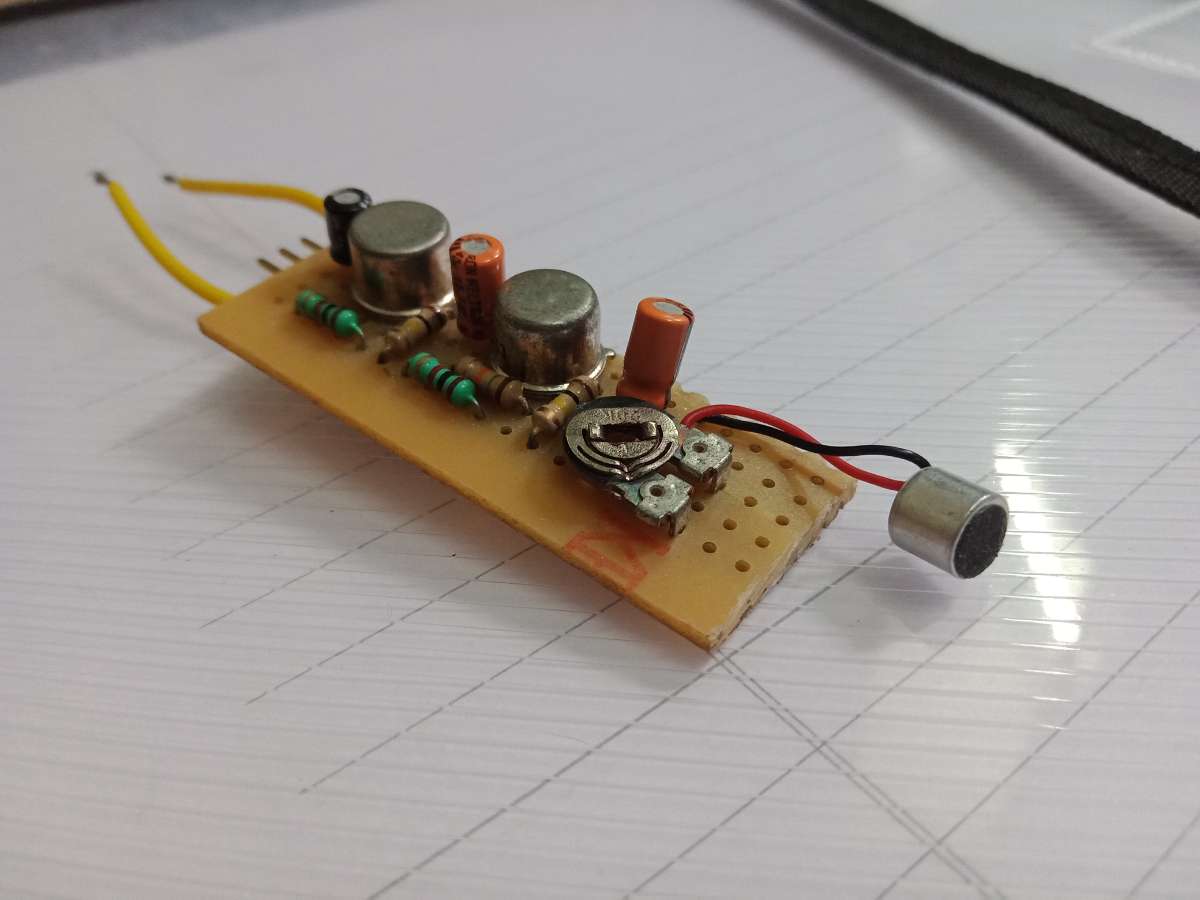
- Then for mimicking my voice in real time I built microphone pre amplifier circuit using transistors. and connected this into exoskeleton in front of my mouth.
- And for output section I took plastic mask and painted it with skin toned colors for realistic effect. then I made eyeball using ping pong balls by cutting in half and painting then with nail polish. Then for jaw I took round shaped plastic jeweler holding box and carved teeth on it using blade and paint them afterwards.
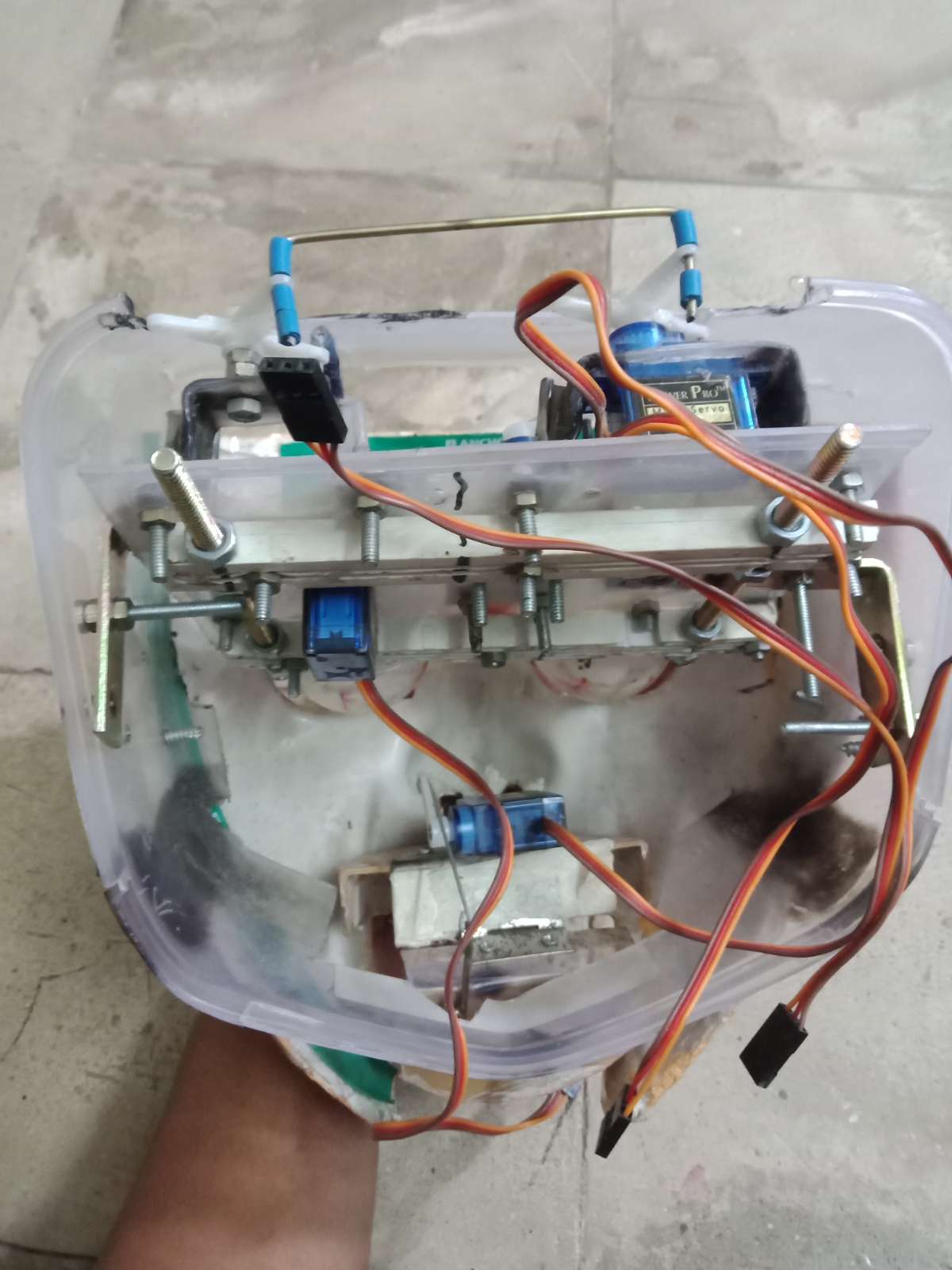
- Then a attached servo motor with such a mechanism so that if there is change in servo motor the joints on out put head will act accordingly.

- After I connected everything i.e. input exoskeleton ,controlling unit and output head and took several test. end results are great but my aim is to build full body robot so currently I am working with to different parts one is to make robotic head more realistic using advance molding process and second is to make robotic hand which mimics hand movement in real time with wireless communication.
