
Introduction :- Weight operated mobile robot is design for material supply one station to another station a desired weight in Kg/Grams.
Architecture:-
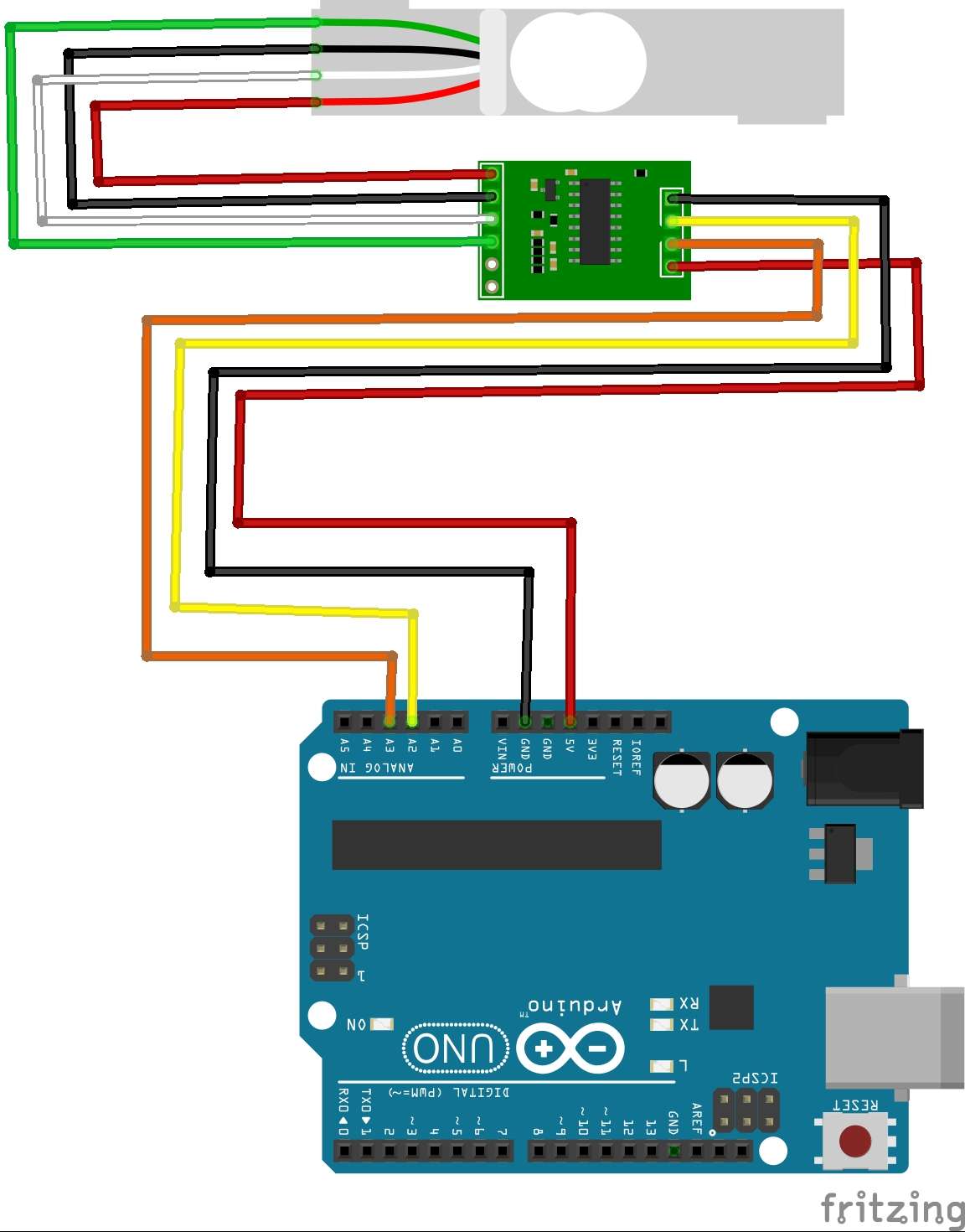
Step 1:- First Arduino uno, load cell and HX711 ADC connection to each other. Calibrate and interface the weight 190<200<210 grams.
Calibration Circuit Diagram :-
Calibration Video Link :- https://drive.google.com/file/d/15wCbCbTuUNQH0weIU_npZAL2lDjSQYnn/view?usp=drivesdk
Calibration Result Video Link :- https://drive.google.com/file/d/15x_7JzDJywCqojY3S2N7wcCMCBmO6UeR/view?usp=drivesdk
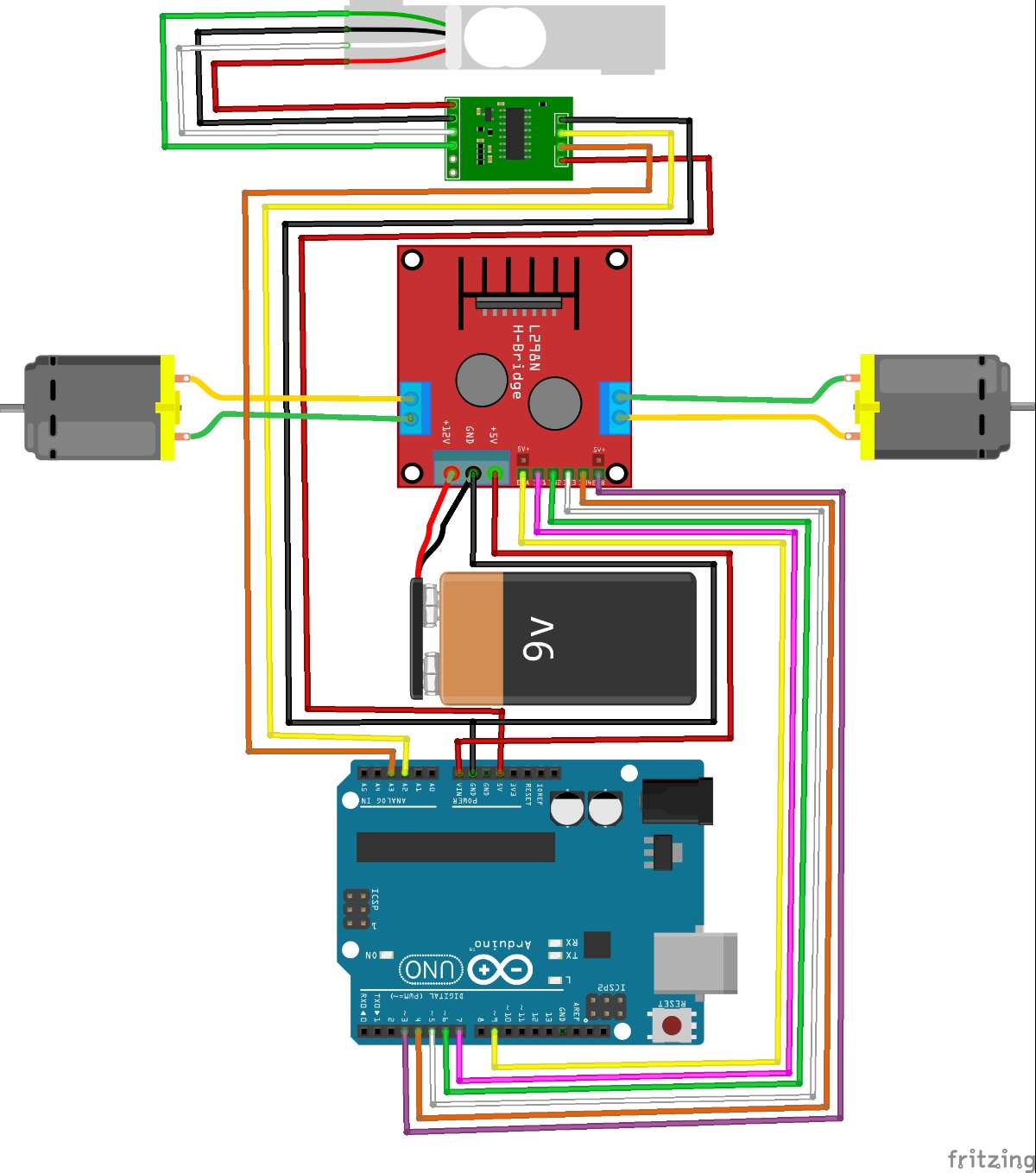
Step 2:- Interface the Arduino, 5 kg Load cell, and Motor Driver L298N. Weight limits used in program code, when 190<200<210 gram weight put on the surface of mobile robot then start the mobile robot in running condition.
Project Circuit Diagram:-
Project Demo Video Link:- https://drive.google.com/file/d/15xSnavRYHH_cOqEr4tmRd7bt5dQ2qcIA/view?usp=drivesdk
Final Project Video Link:- https://youtube.com/shorts/ebJA1BsCcEY?feature=share