Introducing NAMO: Nexus Astro-Terrain Monitor Rover
The Nexus Astro Terrain Monitor (NAMO) rover is an advanced autonomous vehicle designed for space exploration. Equipped with Lidar, the Robot Operating System (ROS), and an IMU 6050 sensor, NAMO navigates its path, overcomes challenging terrains, and avoids obstacles with exceptional precision. These sophisticated systems allow NAMO to traverse diverse environments, unlocking unprecedented realms of exploration previously considered beyond reach.
At the heart of NAMO's operational framework is the Nvidia Jetson Nano, serving as its cornerstone control unit. This compact yet powerful mainboard orchestrates the rover's activities, harmonizing data inputs from various sensors and systems to execute flawlessly coordinated maneuvers within the enigmatic confines of space.
NAMO transcends conventional rover paradigms by incorporating a multifunctional 6-DOF robotic hand capable of executing intricate pick-and-place operations. This capability expands the rover's repertoire, facilitating sample collection, manipulation, and interaction with the extraterrestrial milieu. Such advancements enhance our understanding of cosmic phenomena and allow for more detailed scientific research.
Additionally, NAMO boasts a sophisticated object detection apparatus powered by a Raspberry Pi 4 and a webcam. This setup augments its observational prowess, enabling the rover to identify and scrutinize objects of scientific interest. With this capability, NAMO can execute complex tasks with commendable precision and efficiency.
The chassis of NAMO is underpinned by a rocker-bogie mechanism, meticulously crafted from lightweight PVC material and zinc-tin alloy sheeting. This design imparts optimal stability and maneuverability, allowing NAMO to navigate rugged terrains with ease while enduring the rigors of space exploration.
.png)

.png)
.png)
.png)
.png)
Video
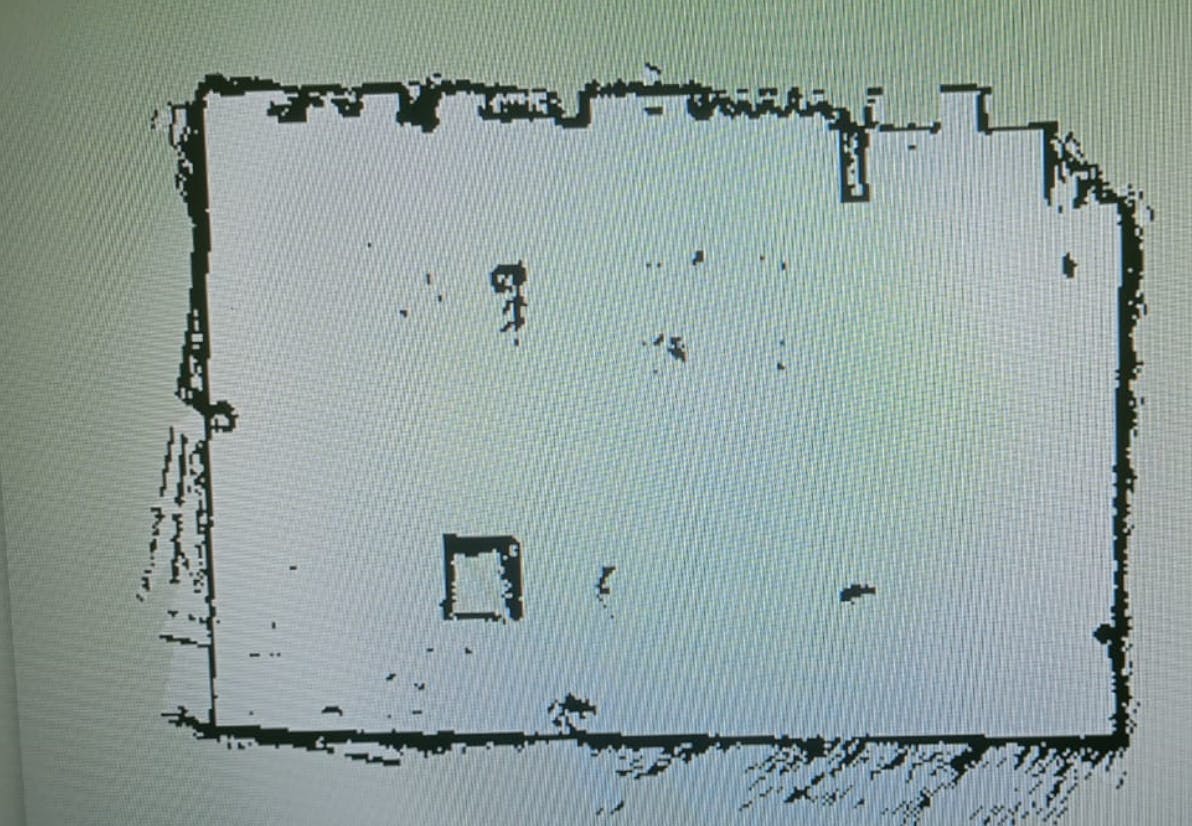
Final Mapping by RP LiDAR: