
1. INTODUCTION
Today, India is one of the developing country in the world. The development of a nation is in the hands of people. Nowadays due to urbanization people are so busy in their world. This urbanization has lead to the development of roads and highways. Due to this we can see a drastic change in increase of vehicles on roads. Over a period of decade we can see many accidents that had occurred on the roads and highways. Due to accidents many people had lost their precious life. So our project aims to protect the lives of people when accident occurs. The only 1st idea that comes to a person when he sees an accident is to call the Ambulance. It is a life savior to many of them. Sometimes the ambulance fails to take the patient to hospital in time. Traffic is one of the reason for this. Our project is well designed and traffic free which helps to take the patient to hospital in time LIPRO model consists of an IR-LED and Photodiode arrangement for each motor which is controlled by the switching on and off of the transistor. The IR LED on getting proper biasing emits Infra red light. This IR light is reflected in case of a white surface and the reflected IR light is incident on the photodiode. The resistance of the photodiode decreases, which leads to an increase in current through it and thus the voltage drop across it. The photodiode is connected to the base of the transistor and as a result of increased voltage across the photodiode, the transistor starts conducting and thus the motor connected to the collector of the transistor gets enough supply to start rotating. In case of a black color on the path encountered by one of the sensor arrangement, the IR light is not reflected and the photodiode offers more resistance, causing the transistor to stop conduction and eventually the motor stops rotating.
2. DESCRIPTION OF THE IDEA
Our project LIPRO plays a role as similar to the ambulance. It is an electric vehicle which is programmed and automated to run itself on the track. It contain required medical equipment necessary to take the patient to hospital. As per our idea any highways and roads will have a divider in-between it. A small bridge has to be constructed on the divider not exceeding it’s width. The bridge has to be constructed in such a way that it connects every hospitals. When an accident occurs on the road, the person who sees it can give a miss call to a toll free number like 108. LIPRO comes to the spot using the location of the informer's phone number and the patient can be taken to hospital in time. There is no risk of traffic in this idea.
3. PROJECT BUILDING
STEP 1
- Choose a right chassis required for the project, mount two BO motors to the chassis and attach wheels to the motors as shown in figure 1.
.jpg)
STEP 2
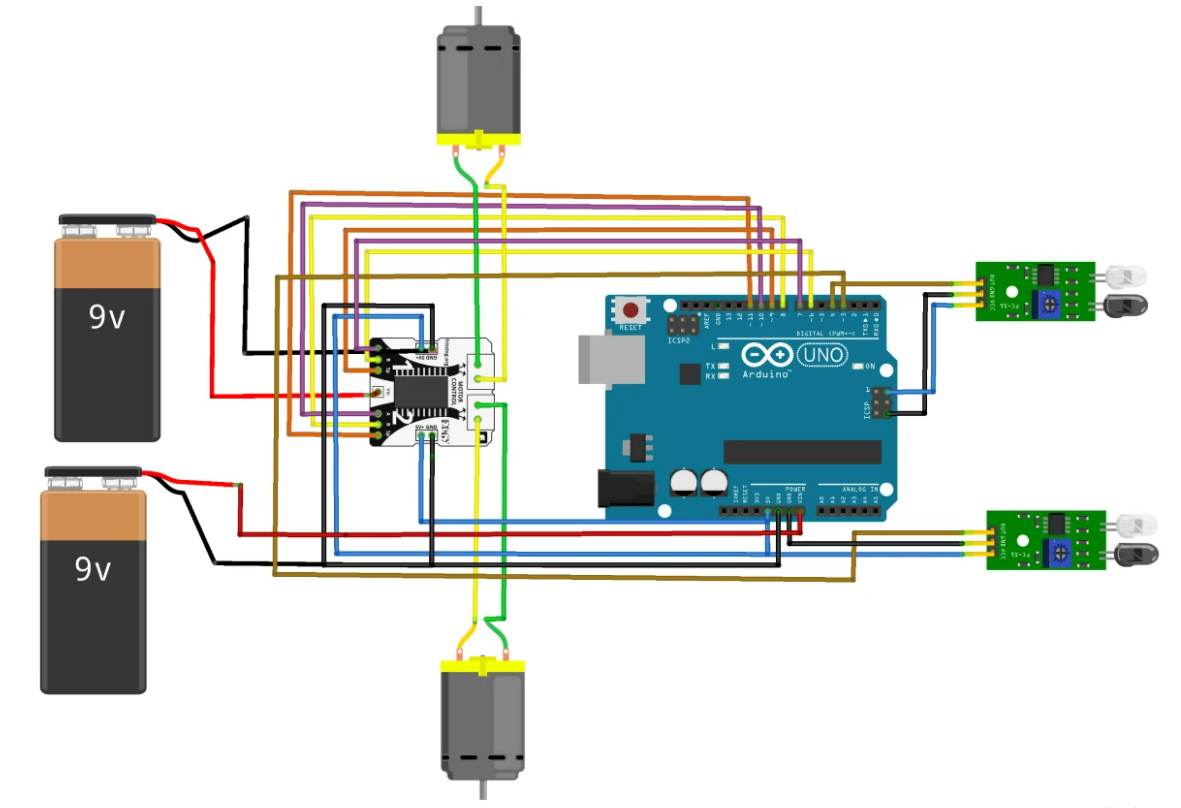
- Connect two motors to the driver with a supply of 9-12V.
- Now take the Arduino and mount it on chassis and power up using power jack as shown in above figure.
- Make the connections as shown in figure 2.
STEP 3
- Upload the given code to Arduino UNO using Arduino software.
#define en1 9
#define input1 6
#define input2 7
#define en2 11
#define input3 10
#define input4 8
#define L_sensor 4
#define R_sensor 3
void setup() {
pinMode(en1, OUTPUT);
pinMode(en2, OUTPUT);
pinMode(input1, OUTPUT);
pinMode(input2, OUTPUT);
pinMode(input3, OUTPUT);
pinMode(input4, OUTPUT);
pinMode(L_sensor, INPUT);
pinMode(R_sensor, INPUT);
// put your setup code here, to run once:
Serial.begin(9600);
analogWrite(en1,250);
analogWrite(en2, 250);
}
void loop() {
if((digitalRead(L_sensor) == HIGH) && (digitalRead(R_sensor) == HIGH)){
Serial.println(" Left and Right sensors are high");
digitalWrite(input1, HIGH);
digitalWrite(input2, LOW);
digitalWrite(input3, HIGH);
digitalWrite(input4, LOW);
}
else if((digitalRead(L_sensor) == HIGH) && (digitalRead(R_sensor) == LOW)){
Serial.println(digitalRead(L_sensor));
Serial.println(digitalRead(R_sensor));
digitalWrite(input1, LOW);
digitalWrite(input2, LOW);
digitalWrite(input3, HIGH);
digitalWrite(input4, LOW);
}
else if((digitalRead(L_sensor) == LOW) && (digitalRead(R_sensor) == HIGH)){
Serial.println(" Left Low");
Serial.println(Right HIGH);
digitalWrite(input1, HIGH);
digitalWrite(input2, LOW);
digitalWrite(input3, LOW);
digitalWrite(input4, LOW);
}
else {
digitalWrite(input1, LOW);
digitalWrite(input2, LOW);
digitalWrite(input3, LOW);
digitalWrite(input4, LOW);
}
}STEP 4
- In order to start the LIPRO you can place a switch and manually turn on it.
- Or you can use GSM module along with Arduino and make connection as shown in figure 3 to ON the model.
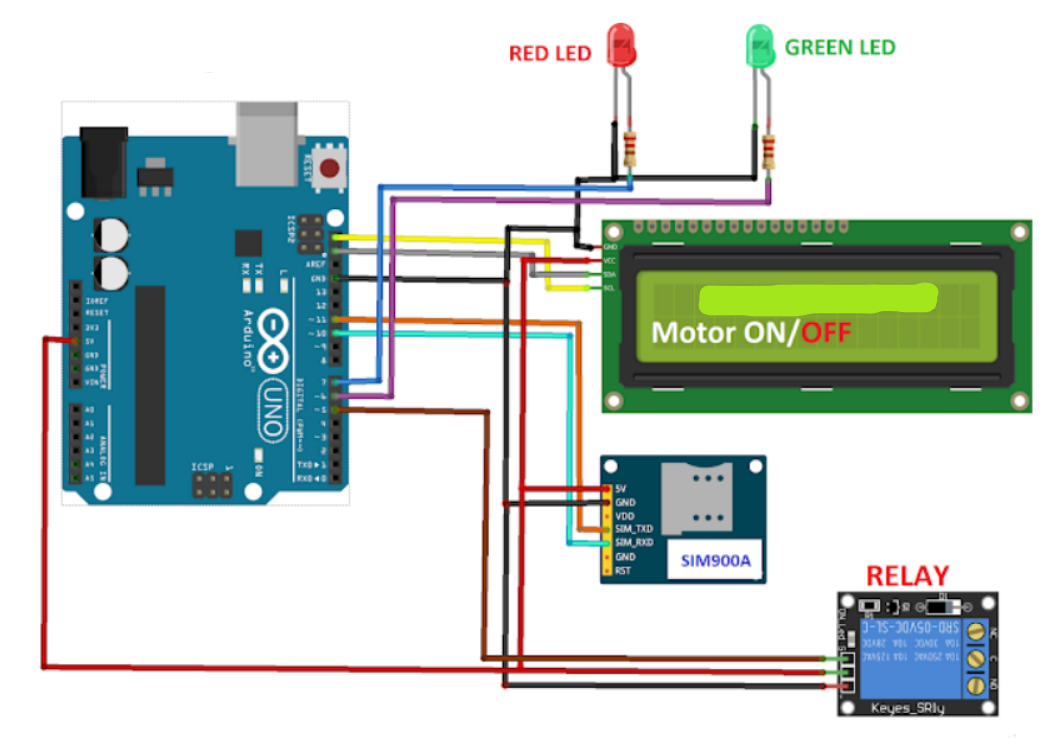
- Now connect the motor driver to the relay.
STEP 5
- Upload the given code to Arduino.
#include <LiquidCrystal_I2C.h>
#include <SoftwareSerial.h>
#include <EEPROM.h>
SoftwareSerial gsm(10, 11); // RX, TX
LiquidCrystal_I2C lcd(0x27, 16, 2);
int address = 0;
int wr_call_add = 1;
int f_address = 2;
int eeprom_dead = 3;
int wr_call_val = 0;
int f_value = 70;
int value = 0;
int ring = 0;
int i = 0;
int var = 0;
int eeprom_tst = 0;
int eeprom_tst_ack = 0;
int tst_var = 100;
int wr_call_tst = 100;
int eeprom_dead_val = 0;
String number = "";
String string = "";
const int output = 5;
const int red = 7;
const int buzzer = 4;
const int green = 6;
boolean wait = true;
boolean at_flag = 1;
boolean net_flag = 1;
void setup()
{
Serial.begin(9600);
lcd.init();
lcd.backlight();
gsm.begin(9600);
pinMode(output, OUTPUT);
pinMode(red, OUTPUT);
pinMode(buzzer, OUTPUT);
pinMode(green, OUTPUT);
if (EEPROM.read(f_address) != f_value)
{
EEPROM.write(f_address, f_value);
EEPROM.write(address, value);
EEPROM.write(wr_call_add, wr_call_val);
eeprom_dead_val = 0;
EEPROM.write(eeprom_dead, eeprom_dead_val);
}
if (EEPROM.read(eeprom_dead) == 1)
{
while (true)
{
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("EEPROM Error.");
lcd.setCursor(0, 1);
lcd.print("System Disabled.");
delay(1500);
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("Reload the code");
lcd.setCursor(0, 1);
lcd.print("with new address");
delay(1500);
}
}
if (EEPROM.read(address) == 0)
{
digitalWrite(output, LOW);
digitalWrite(red, HIGH);
digitalWrite(buzzer, LOW);
delay(2000);
digitalWrite(green, LOW);
gsm_init();
lcd.clear();
if (EEPROM.read(wr_call_add) == 0)
{
lcd.setCursor(0, 0);
lcd.print("Sending SMS");
lcd.setCursor(0, 1);
lcd.print("Acknowledgement.");
delay(1000);
gsm.println("AT+CMGF=1");
delay(500);
gsm.print("AT+CMGS=");
gsm.print("\"");
gsm.print(str);
gsm.println("\"");
delay(1000);
gsm.println("Motor is OFF / System is Ready.");
delay(100);
gsm.println((char)26);
}
if (EEPROM.read(wr_call_add) == 1)
{
wr_call_val = 0;
EEPROM.write(wr_call_add, wr_call_val);
}
}
if (EEPROM.read(address) == 1)
{
eeprom_test();
output_begin();
}
}
void(* resetFunc) (void) = 0;
void loop()
{
serialEvent();
if (ring == 1)
{
number = "+918830584864";
var = string.indexOf("+CLIP: \"");
if (var > 0)
{
number += string.substring(var + 8, var + 13 + 7);
}
if (number[0] == str[0] && number[1] == str[1] && number[2] == str[2] && number[3] == str[3]
&& number[4] == str[4] && number[5] == str[5] && number[6] == str[6] && number[7] == str[7]
&& number[8] == str[8] && number[9] == str[9] && number[10] == str[10] && number[11] == str[11])
{
gsm.println("ATH");
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("Incomming call");
lcd.setCursor(0, 1);
lcd.print("Number Verified.");
delay(2000);
if (EEPROM.read(address) == 0)
{
EEPROM.write(address, 1);
}
else if (EEPROM.read(address) == 1)
{
EEPROM.write(address, 0);
}
resetFunc();
}
if (!(number[0] == str[0] && number[1] == str[1] && number[2] == str[2] && number[3] == str[3]
&& number[4] == str[4] && number[5] == str[5] && number[6] == str[6] && number[7] == str[7]
&& number[8] == str[8] && number[9] == str[9] && number[10] == str[10] && number[11] == str[11]))
{
gsm.println("ATH");
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("Unknown number");
lcd.setCursor(0, 1);
lcd.print("Call Rejected.");
wr_call_val = 1;
EEPROM.write(wr_call_add, wr_call_val);
delay(2000);
resetFunc();
}
}
if (EEPROM.read(address) == 0)
{
serialEvent();
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("System Standby");
lcd.setCursor(0, 1);
lcd.print("Status: OFF");
delay(1000);
}
else if (EEPROM.read(address) == 1)
{
lcd.setCursor(0, 0);
lcd.print("STATUS: ON");
lcd.setCursor(0, 1);
lcd.print("----------------");
}
}
void gsm_init()
{
lcd.print("System booting....");
lcd.setCursor(0, 1);
lcd.print("initiating......");
delay(1500);
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("Checking Module");
lcd.setCursor(0, 1);
lcd.print("Connectivity....");
while (at_flag)
{
gsm.println("AT");
while (gsm.available() > 0)
{
if (gsm.find("OK"))
at_flag = 0;
}
delay(1000);
}
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("Module");
lcd.setCursor(0, 1);
lcd.print("Connection: OK");
delay(1500);
eeprom_test();
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("System is Ready");
lcd.setCursor(0, 1);
lcd.print("----------------");
delay(1500);
}
void serialEvent()
{
while (gsm.available())
{
char read_char = gsm.read();
string += read_char;
i++;
if (string[i - 4] == 'R' && string[i - 3] == 'I' && string[i - 2] == 'N' && string[i - 1] == 'G' )
{
ring = 1;
}
}
}
void output_begin()
{
digitalWrite(red, LOW);
digitalWrite(buzzer, HIGH);
delay(2000);
digitalWrite(buzzer, LOW);
digitalWrite(green, HIGH);
if (EEPROM.read(wr_call_add) == 0)
{
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("Sending SMS");
lcd.setCursor(0, 1);
lcd.print("Acknowledgement.");
delay(1000);
gsm.println("AT+CMGF=1");
delay(500);
gsm.print("AT+CMGS=");
gsm.print("\"");
gsm.print(str);
gsm.println("\"");
delay(1000);
gsm.println("Motor is ON.");
delay(100);
gsm.println((char)26);
}
if (EEPROM.read(wr_call_add) == 1)
{
wr_call_val = 0;
EEPROM.write(wr_call_add, wr_call_val);
}
lcd.clear();
}
void eeprom_test()
{
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("Testing EEPROM");
lcd.setCursor(0, 1);
lcd.print("Memory.");
delay(1500);
eeprom_tst = EEPROM.read(address);
eeprom_tst_ack = EEPROM.read(wr_call_add);
EEPROM.write(address, tst_var);
EEPROM.write(wr_call_add, wr_call_tst);
if (EEPROM.read(address) == tst_var && EEPROM.read(wr_call_add) == wr_call_tst)
{
EEPROM.write(address, eeprom_tst);
EEPROM.write(wr_call_add, eeprom_tst_ack);
if (EEPROM.read(address) != eeprom_tst || EEPROM.read(wr_call_add) != eeprom_tst_ack)
{
digitalWrite(output, LOW);
digitalWrite(red, HIGH);
digitalWrite(buzzer, LOW);
delay(2000);
digitalWrite(green, LOW);
eeprom_dead_val = 1;
EEPROM.write(eeprom_dead, eeprom_dead_val);
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("EEPROM Test is");
lcd.setCursor(0, 1);
lcd.print("Unsuccessful.");
delay(1500);
}
else if (EEPROM.read(address) == eeprom_tst && EEPROM.read(wr_call_add) == eeprom_tst_ack)
{
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("EEPROM Test is");
lcd.setCursor(0, 1);
lcd.print("Successful.");
delay(1500);
}
}
else if (EEPROM.read(address) != tst_var || EEPROM.read(wr_call_add) != wr_call_tst)
{
digitalWrite(output, LOW);
digitalWrite(red, HIGH);
digitalWrite(buzzer, LOW);
delay(2000);
digitalWrite(green, LOW);
eeprom_dead_val = 1;
EEPROM.write(eeprom_dead, eeprom_dead_val);
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("EEPROM Test is");
lcd.setCursor(0, 1);
lcd.print("Unsuccessful.");
delay(1500);
}
}
void eeprom_sms()
{
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("Sending SMS");
lcd.setCursor(0, 1);
lcd.print("Acknowledgement");
delay(1000);
gsm.println("AT+CMGF=1");
delay(500);
gsm.print("AT+CMGS=");
gsm.print("\"");
gsm.print(str);
gsm.println("\"");
delay(1000);
gsm.println("EEPROM error. System disabled. Please reload the code with new address.");
delay(100);
gsm.println((char)26);
{
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("EEPROM Error.");
lcd.setCursor(0, 1);
lcd.print("System Disabled.");
delay(1500);
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("Reload the code");
lcd.setCursor(0, 1);
lcd.print("with new address");
delay(1500);
}
}
STEP 6
- Make a bridge or a track for Lipro.
- Here I had used waste bottles and sunmica sheets to build a bridge as shown in figure 4.
.jpg)
4. VIDEO DEMONSTRATION
5. CONCLUSION
The novelty in our idea is that since the applications of line follower robot can be seen in industrial and domestic sectors, our project differs from all by upholding and showing the world that it can also be used as an Ambulance. It can also run using sunlight by mounting solar panels on it. As mentioned above life is very precious and we all have one life. Lipro performs the work of an ambulance and saves the life of a person by taking him to hospital in time. There is no question of obstacle or traffic to it as there is a separate path for the movement of Lipro. It is also eco-friendly and pollution free as it runs by using electric power and sunlight. Lipro saves,
* Natural Resource(petrol/diesel)
* Environment
* Time
* Life
