

High speed heavily loaded vehicles are prone to accidents when they take a turn over bends. This is avoided by the timely alert to the driver by our system. The parameters taken for the alert includes weight of the load and steering angle. If there is a potential hazard on the road, the vehicle will intimate the driver as well as the surrounding vehicles with the help of vehicular ad-hoc networks through an visual display. The driver will remain in control as these are an only warning which helps to prevent toppling of trucks. Controller Area Network (CAN) is a predominant way of interaction between several electronic control units. Our solution to the toppling problem can be implemented by CAN for better communication. Since vehicle posses both low priority and high priority interrupts which are timely responded by the controller. Therefore the CAN based solution is preferred among other wire communication protocols. This helps largely in shared logistics industry for safeguard the life of driver and reduce the time of attending to accident spot if they are not responded or stopped in the middle of journey.
HOW IT WORKS:
STEP1:
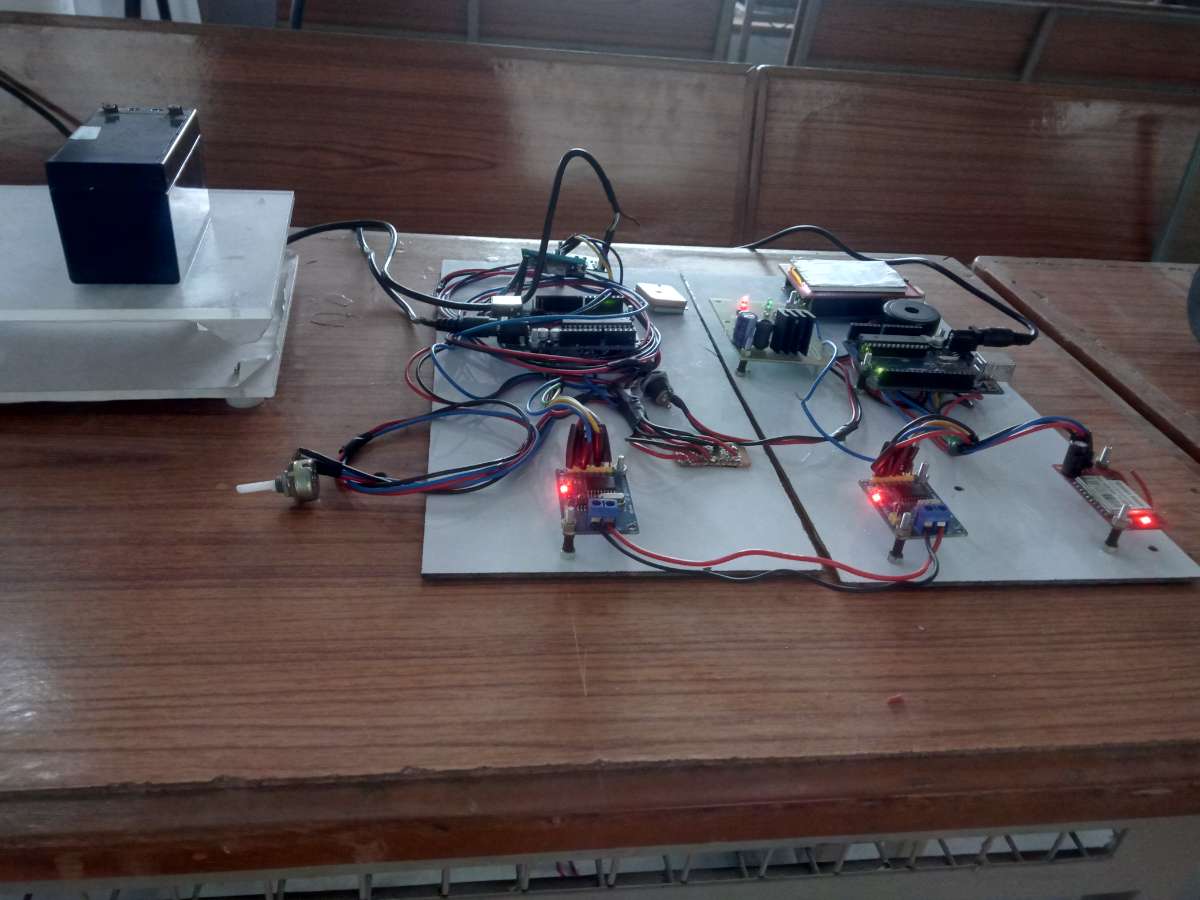
Fundamentally, it has two systems.
Dashboard and Weight systems
step2:
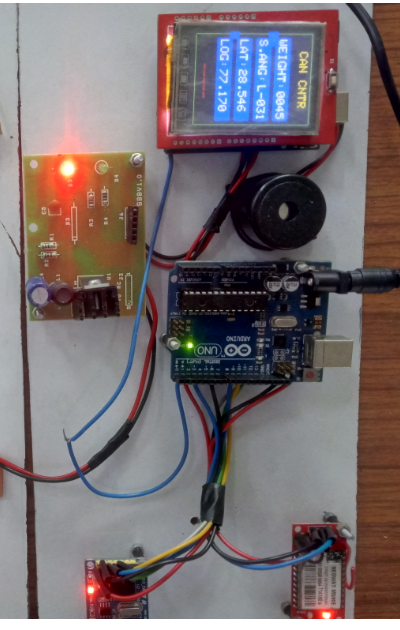
Monitoring the steering angle and vehicle weight is the primary usage of dash board systems.
step3:
As soon as the vehicle exceeds the threshold amount of speed, the alarm will sound.
step4:
When calculating the turning angle and average speed for a vehicle, Google Maps takes into account the angle of the road
so as to lessen truck tipping.
step5:
if the person falls asleep while driving and accidentally throws the steering.
Afterward, a buzzer will signal.
step6:
We can track the location of the vehicle using this technology, and if an accident happens, a call will automatically be sent to the person in charge and a local aid centre.
step7:
When we use the can module, we can send information to the system very quickly.
step 8:
We used a load cell to maintain the vehicle's accurate weight.
DEMO VIDEO:
CAN BUS CONNECTIVITY:
.png)
GSM AND GPS CONNECTIVITY:
.png)
DRIVER VISIBILITY DISPLAY:

DASHBOARD MANAGEMENT SYSTEM:
WEIGHT MANAGEMENT SYSTEM:
.png)
LOAD CELL:
.png)
.png)
ACCIDENT ALERT:
.png)