Current System
In the current landscape of remote monitoring systems, a typical setup involves the utilization of distinct configurations for both surveillance and weather monitoring. Surveillance mechanisms often encompass the deployment of standalone robotic units or strategically positioned fixed cameras, allowing for real-time observation of targeted areas. These surveillance systems offer operators the capability to access live or recorded video feeds and, in certain instances, exert control over the movements of robotic platforms, thus enabling dynamic monitoring. Conversely, weather monitoring entails the establishment of separate weather stations, typically equipped with an array of sensors designed to capture meteorological data such as temperature, humidity levels, and atmospheric pressure. While these standalone weather monitoring systems are instrumental in collecting crucial environmental information, they function autonomously and operate independently of surveillance platforms. This disjointed operational paradigm poses inherent challenges in integrating surveillance data with meteorological insights in real-time, resulting in fragmented situational awareness. Moreover, the management of disparate systems adds complexity to operations and increases resource requirements. Therefore, there exists a discernible imperative for the development of an integrated solution that amalgamates surveillance and weather monitoring functionalities into a unified platform. Such integration promises to streamline operations, foster comprehensive situational awareness, and enhance the efficacy of decision-making processes in diverse operational contexts.
Proposed System
The proposed system introduces an innovative approach to remote monitoring and situational awareness by integrating surveillance and weather monitoring functionalities into a single, cohesive platform. Firstly, the system boasts a robust architecture, with components like the Arduino UNO, NODE MCU, GPS, BMP180 pressure sensor, and DHT11 humidity and temperature sensor mounted onto a sturdy robot chassis. This design ensures durability and reliability, enabling the system to operate effectively in various environments and conditions. Secondly, precise navigation across different terrains is achieved through the utilization of the L293D motor driver module. This module allows for seamless control of the robot’s DC motors, enhancing its mobility and maneuverability. Power management is another essential aspect of the system, with a 5V power supply and a 12V battery incorporated to ensure continuous operation. This setup provides sufficient power to all components, allowing for extended usage without interruptions. One of the standout features of the proposed system is its sensor fusion capability. Algorithms are implemented to fuse data from the BMP180, DHT11, and GPS modules, providing real-time weather updates and accurate location information. This integrated approach enhances the system’s utility and effectiveness in various applications, such as disaster response, agriculture, and security. Furthermore, the system includes surveillance capabilities facilitated by an IP camera mounted onto the robot chassis. This camera streams live video feed, enabling remote surveillance and monitoring, thereby enhancing situational awareness. To facilitate user interaction and control, a user-friendly interface is developed for remote control and monitoring. This interface allows operators to command the robot, access weather data, and view live video feeds effortlessly, enhancing usability and accessibility. Finally, reliable communication protocols are established to transmit sensor data and video feed from the robot to a central control station for analysis. This ensures seamless data transmission and enables timely decision-making based on the information collected by the system. In summary, the proposed system offers a comprehensive solution to remote monitoring and situational awareness, combining surveillance and weather monitoring capabilities into a single, integrated platform. With its robust architecture, precise navigation, sensor fusion capability, surveillance features, user-friendly interface, and reliable communication protocols, the system is poised to make significant contributions across various fields, enhancing operational capabilities and facilitating informed decision-making.
Block Diagram
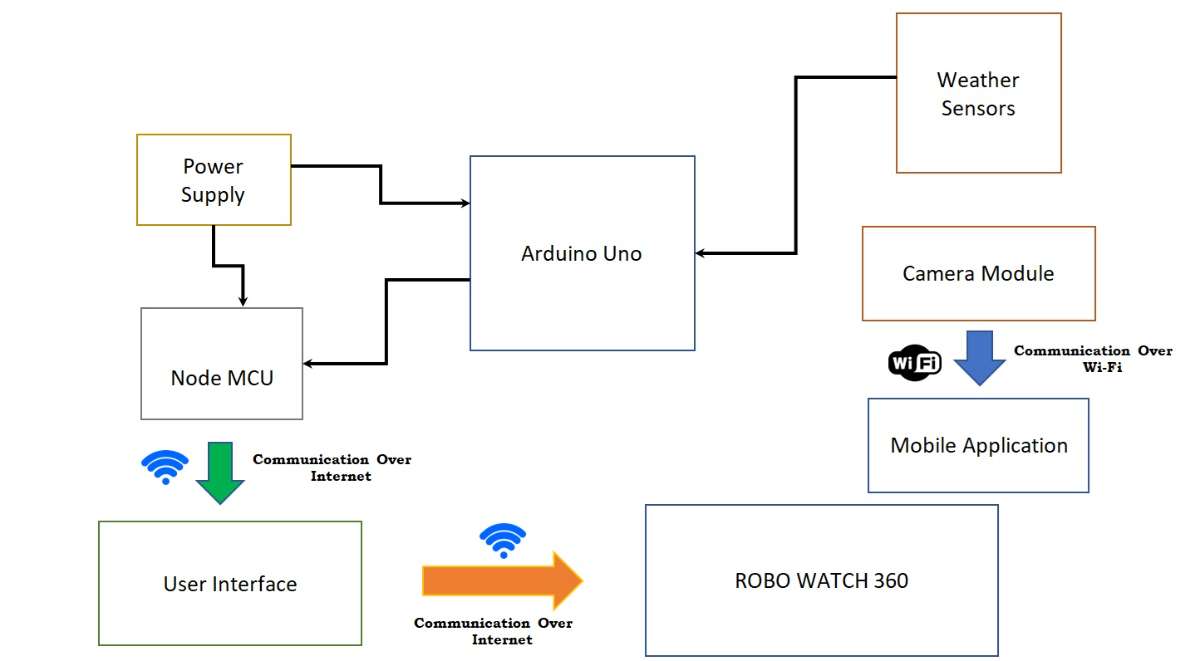
The block diagram illustrates the architecture and components of the integrated surveillance robot with real-time weather monitoring system are as show in the Fig 3.1. At the core of the system is the versatile robot platform, which serves as the foundation for integrating various sensors and components. The key components include the Arduino DHT11 sensor for temperature and humidity monitoring, the NodeMCU for wireless communication and data transmission, the BMP180 for pressure sensing, and an IP camera for visual surveillance. The sensors gather real-time environmental data, which is then processed and transmitted to the Adafruit IO platform for storage and visualization. Adafruit IO serves as the central control hub, where users can monitor and analyze the weather parameters and surveillance footage in real-time. Additionally, the live video feed from the IP camera is accessible through an Android app, providing users with remote surveillance capabilities.
The system is designed to be autonomous, allowing the robot platform to navigate its environment while simultaneously conducting surveillance tasks and collecting weather data. Advanced algorithms govern the robot's movements, ensuring smooth and efficient navigation while avoiding obstacles. The integration of surveillance and weather monitoring capabilities enhances the system's utility across diverse applications, including disaster response, agriculture, and security. Overall, the block diagram highlights the interconnectedness of the system components and illustrates how they work together to provide comprehensive situational awareness and decision-making capabilities in various operational scenarios.
Circuit Diagram
.jpg)
The circuit diagram showcases the interconnected components and wiring layout of the integrated surveillance robot with real-time weather monitoring system in the fig 3.2. At the heart of the circuit is the microcontroller unit, which controls and coordinates the operation of the system. The microcontroller interfaces with various sensors and modules to gather data and execute commands. Starting with the sensor connections, the Arduino DHT11 sensor is connected to the microcontroller to monitor temperature and humidity levels. The BMP180 pressure sensor is also interfaced with the microcontroller to measure atmospheric pressure. Additionally, the NodeMCU module is connected to enable wireless communication, allowing data transmission to external platforms such as the Adafruit IO platform.
The IP camera is integrated into the circuit to capture live video footage, providing visual surveillance capabilities. The camera is connected to the microcontroller or a separate processing unit for data handling and streaming. Power management components, such as voltage regulators and battery connections, are included to ensure stable power supply to the system. Furthermore, motor control circuits are incorporated to drive the robot's locomotion, enabling autonomous navigation. Overall, the circuit diagram illustrates the connections between the various components, highlighting their roles in data acquisition, processing, and communication. It serves as a visual guide for building and assembling the surveillance robot system, ensuring proper wiring and configuration for optimal performance.
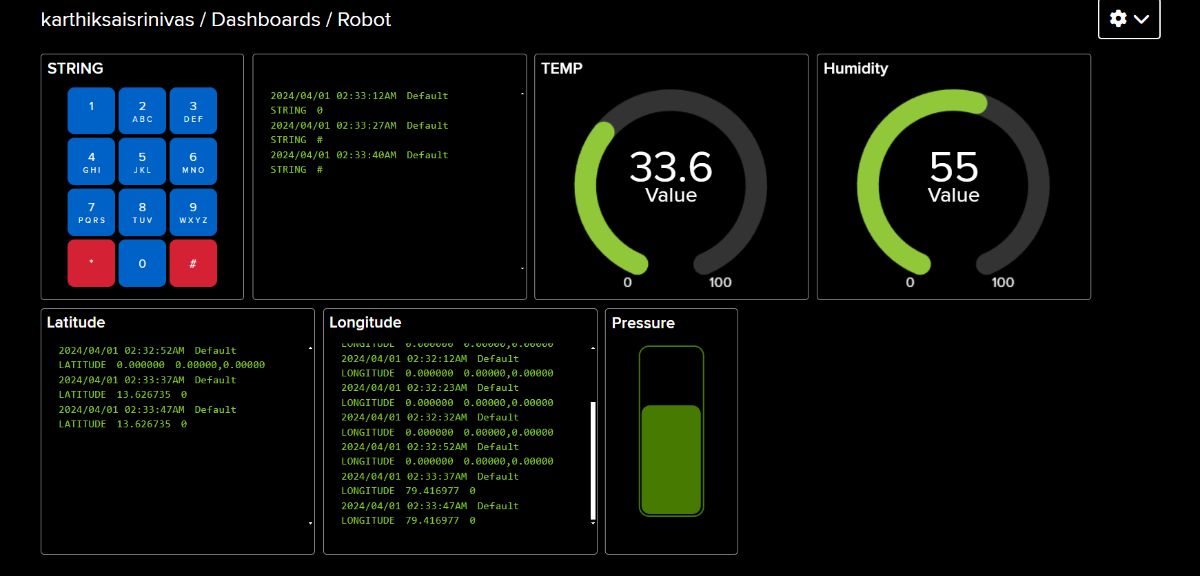
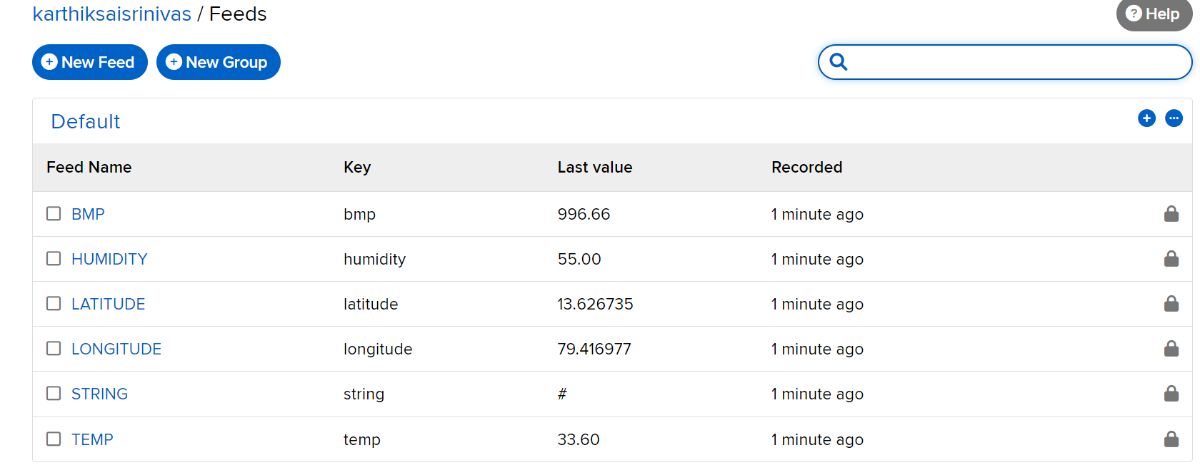
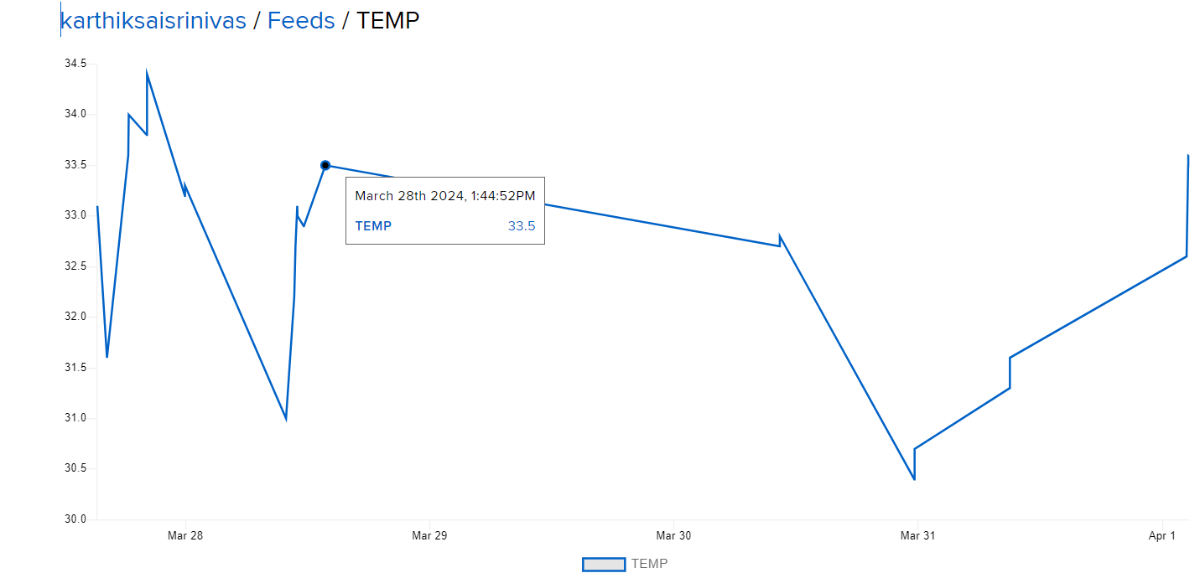
Monitor the output on the Adafruit Website: 4