Achievement
This project has won the 1st award recently during final year project competition in my university.
Introduction
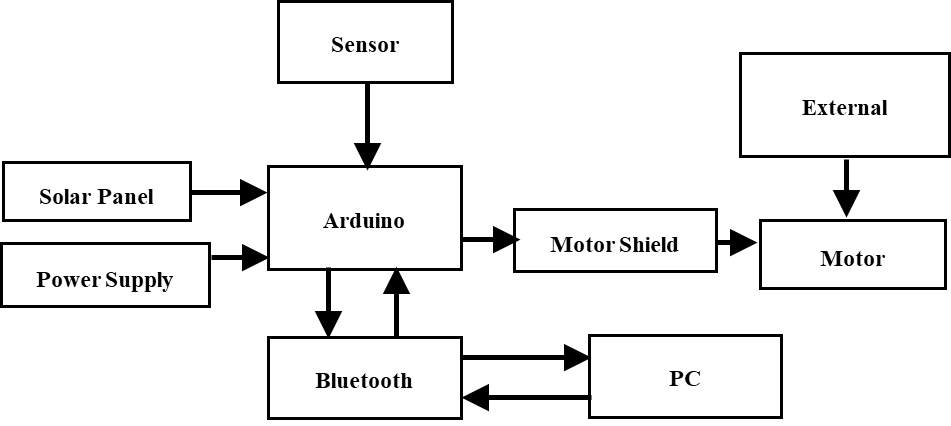
This project is developing an automatically dual axis solar tracker which rotates 360 degrees around the azimuth axis and 180 degrees around the altitude axis. It is using the simple technology and components such as LDR to detect the brighter spot, and the solar tracking system will then actuate the servo motors to position the solar panel to be perpendicular to the sun to maximize the power efficiency of solar panel.
Objectives
- To design and develop an automatically (active-based) azimuth-altitude dual axis solar tracking system
- To investigate the efficiency of azimuth-altitude axis solar tracker system.
- To develop a dual axis solar tracker that maximize the solar panel output power efficiency
Problem Statements
The maximum efficiency of solar panels has been reduced due to limited movement where it can achieve only roughly less than 20%. One of the typical factors that diminishes the output power of solar cells is the solar panel that is not perpendicular to the sun all the time. Due to the sun path, the solar panel power efficiency has been limited, where it only received the maximum light intensity and energy at noon. Thus, the development of a robotic solar tracker is necessary to position the solar panel to be perpendicular to the sun to maximize the output power efficiency.
.png)
Methodology
Master & Slave protocol
The solar tracking system is programmed using both C++ and Python programming languages. The relationship between the Arduino and the Python in PC is Master & slave protocol, and it has been done with HC-06 Bluetooth devices. With the help of Bluetooth devices, I able to collect the solar panel power wirelessly and the Python will help to print the data into Excel file.
.png)
Real Time Simulation of virtual solar tracker and real solar tracker
I also using the Robodk software to implement the virtual solar tracker in the PC screen, such that I don't need to always go to outdoor for checking my solar tracker. And this software is able to simulate my solar tracker movement, such that I can check whether my robotic movement is correct or not. Also, the virtual solar tracker can move simultaneously with the solar tracker in real world.
.png)
.png)
PCB & 3D prototypes design
I also designed the PCB and 3D printed prototypes for my solar tracker. The 3D printed prototypes were designed using the ONSHAPE software. And the PCBs were designed using EasyEDA software.
.png)
.png)
LDR design in dual axis solar tracker
The LDR design used to verify the brighter spot's intensity is as shown in figure below:
.png)
Balanced verification using light intensity
The formulas used for balanced verification are:
- light1-light3 < -range
- light1-light3 > range
- light4-light2 < -range
- light4-light2 > range
Where the light 1 to light 4 is the representation of light intensity of LDR 1 to LDR 4. When the light intensity of 2 LDRs that oppose to each other are unbalanced, the system will knows and it will triggers the servo motors to position the solar panel, that making the solar panel always perpendicular to the brighter spot. The servo motors will not be trigger when it reaches its maximum angle or the light intensities are balanced.
.png)
Experiments
I have ran though several experiments to investigate the power efficiency of my dual axis solar tracker. From the result obtained from experiments, it is proving that the performance of the dual axis solar tracker system is able to be enhanced with the incorporation of robotic technology.
.png)
.png)
Conclusion
A solar system with higher power generation could further faster the time for Return for Investment (ROI) and increase the public motivation to install the solar panel. Furthermore, it could further fulfil the Nation Goal which is to achieve 31% Renewable Energy (RE) share in the national capacity mix by 2025 and attain decarbonization of the electricity sector by 2035, which published by Ministry of Energy and Natural Resources and Sustainable Energy Development Authority (SEDA) Malaysia launched the Malaysia Renewable Energy Roadmap (MyRER).
Demonstration Video
Hardware Wiring Diagram
.png)
Component Block Diagram