
rule book of this project: https://drive.google.com/file/d/18oB38Ia8J0KnDcD78nIT0E13cjU8lR64/view?usp=sharing
Eyrc2019
E-YANTRA 2018-19 Theme - Ant Bot

Marching along the jungle safari are the “Ants” that keep the jungle going. We can’t help but notice their method of work viz. cooperation and coordination - the essential aspects of teamwork. Here we have tried to isolate the work of a single ant in this year’s Ant Bot (AB) theme.
An Ant collects and provides food for not just itself but also its community while leaving a trail or path to the resources for the other ants to follow suit. The Arena is so designed such that the first ant has left a black path behind for the other teammates. Thus, your bot is the teammate AB.
The tasks to be done by the AB across the arena are the same as the first ant i.e. collecting leaves, honey, wood from the Shrubs Area (SA) and store for winter and/or remove trash from its Ant Hills (AH). One of the Ant Hill, the Queen Ant’s Hill (QAH) is always given preferential treatment while doing the service.
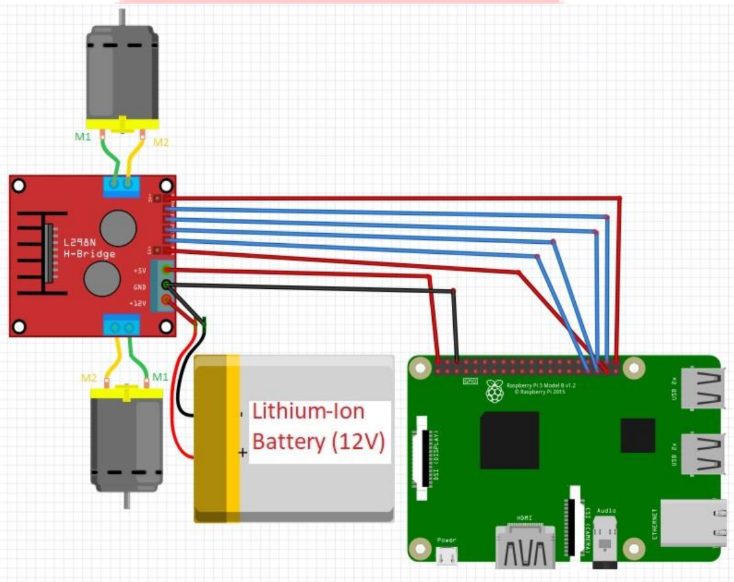
Circuit and Connection
For more detailed information about the circuit and connections, Please refer this file (Click here).
- Connecting RPi 3 with L298N
2. Connecting Arduino Nano & Line Sensor
.png)
Once all the connections between Arduino Nano, Standard and Micro Servo, Line Sensor and Buzzer are made, final circuit should look like below:
.png)
Hardware tasting video:
3>line following robot making
4>ArUco marker detection
5>Image processing program making
6>next video:
Semifinal video: