Introduction
Accelerometer is an electromechanical device that measures force of acceleration due to gravity in g unit.
It can be used in applications requiring tilt sensing.
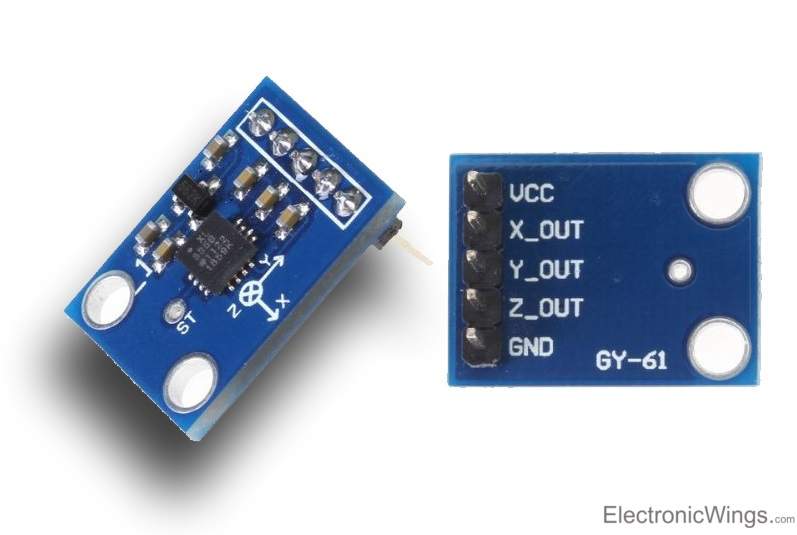
The ADXL335 measures acceleration along X, Y and Z axes and gives analog voltage output proportional to the acceleration along these 3 axes.
Microcontroller can process these voltages by converting them to digital signals using ADC.
For more information about ADXL335 accelerometer and how to use it, refer the topic ADXL335 Accelerometer Module in the sensors and modules section.
Interfacing Diagram
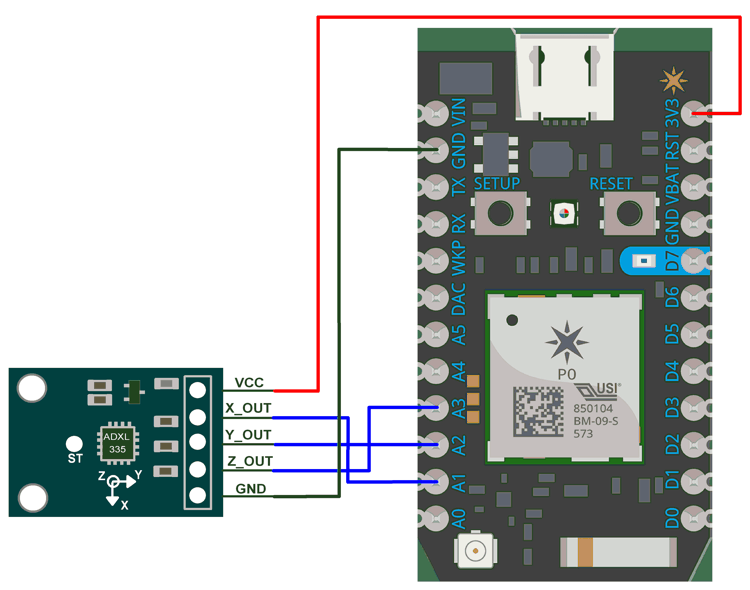
Interfacing ADXL335 Accelerometer Module With Particle Photon
Example
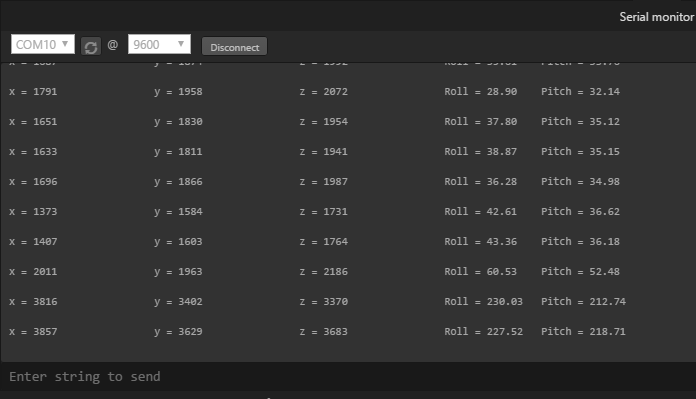
Finding the roll and pitch of the device using analog voltages of accelerometer module and displaying on serial monitor.
Sketch
#include <math.h>
const int x_out = A1; /* connect x_out of module to A1 of Particle Photon board */
const int y_out = A2; /* connect y_out of module to A2 of Particle Photon board */
const int z_out = A3; /* connect z_out of module to A3 of Particle Photon board */
void setup() {
Serial.begin(9600);
}
void loop() {
int x_adc_value, y_adc_value, z_adc_value;
double x_g_value, y_g_value, z_g_value;
double roll, pitch, yaw;
x_adc_value = analogRead(x_out); /* Digital value of voltage on x_out pin */
y_adc_value = analogRead(y_out); /* Digital value of voltage on y_out pin */
z_adc_value = analogRead(z_out); /* Digital value of voltage on z_out pin */
Serial.print("x = ");
Serial.print(x_adc_value);
Serial.print("\t\t");
Serial.print("y = ");
Serial.print(y_adc_value);
Serial.print("\t\t");
Serial.print("z = ");
Serial.print(z_adc_value);
Serial.print("\t\t");
//delay(100);
x_g_value = ( ( ( (double)(x_adc_value * 3.3)/4095) - 1.65 ) / 0.330 ); /* Acceleration in x-direction in g units */
y_g_value = ( ( ( (double)(y_adc_value * 3.3)/4095) - 1.65 ) / 0.330 ); /* Acceleration in y-direction in g units */
z_g_value = ( ( ( (double)(z_adc_value * 3.3)/4095) - 1.80 ) / 0.330 ); /* Acceleration in z-direction in g units */
roll = ( ( (atan2(y_g_value,z_g_value) * 180) / 3.14 ) + 180 ); /* Formula for roll */
pitch = ( ( (atan2(z_g_value,x_g_value) * 180) / 3.14 ) + 180 ); /* Formula for pitch */
//yaw = ( ( (atan2(x_g_value,y_g_value) * 180) / 3.14 ) + 180 ); /* Formula for yaw */
/* Not possible to measure yaw using accelerometer. Gyroscope must be used if yaw is also required */
Serial.print("Roll = ");
Serial.print(roll);
Serial.print("\t");
Serial.print("Pitch = ");
Serial.print(pitch);
Serial.print("\n\n");
delay(1000);
}
Output of Accelerometer
Components Used |
||
|---|---|---|
| Particle Photon PHNTRAYH |
X 1 | |
| ADXL335 Accelerometer Module Accelerometer ADXL335 sensor measures acceleration of gravity. It is used to measure the angle of tilt or inclination in application systems such as in mobile devices, gaming applications, laptops, digital cameras, aeroplanes etc. |
X 1 | |
Downloads |
||
|---|---|---|
|
|
Accelerometer | Download |